About Me
Hello, I am Mingjiang Liu. I received my B.E. degree in automation and M.S. degree in control science and engineering from the Department of Control and System Engineering at Nanjing University in 2019 and 2022, respectively, under the supervision of Prof. Chunlin Chen. I am currently pursuing a Ph.D. supervised by Dr. Hailong Huang in the Department of Aeronautical and Aviation Engineering at PolyU, where I am a member of the Autonomous Interactive Mobile Systems (AIMS) group.
My primary research interests lie in Robotics and Reinforcement Learning, particularly exploring the integration of conventional techniques with learning-based methods to enhance the robustness and adaptability of robot systems. Currently, I focus on the following research topics:
- Human-Robot Collaboration
- Learning for Dynamics, Control, and Planning
Publications
Journal Papers
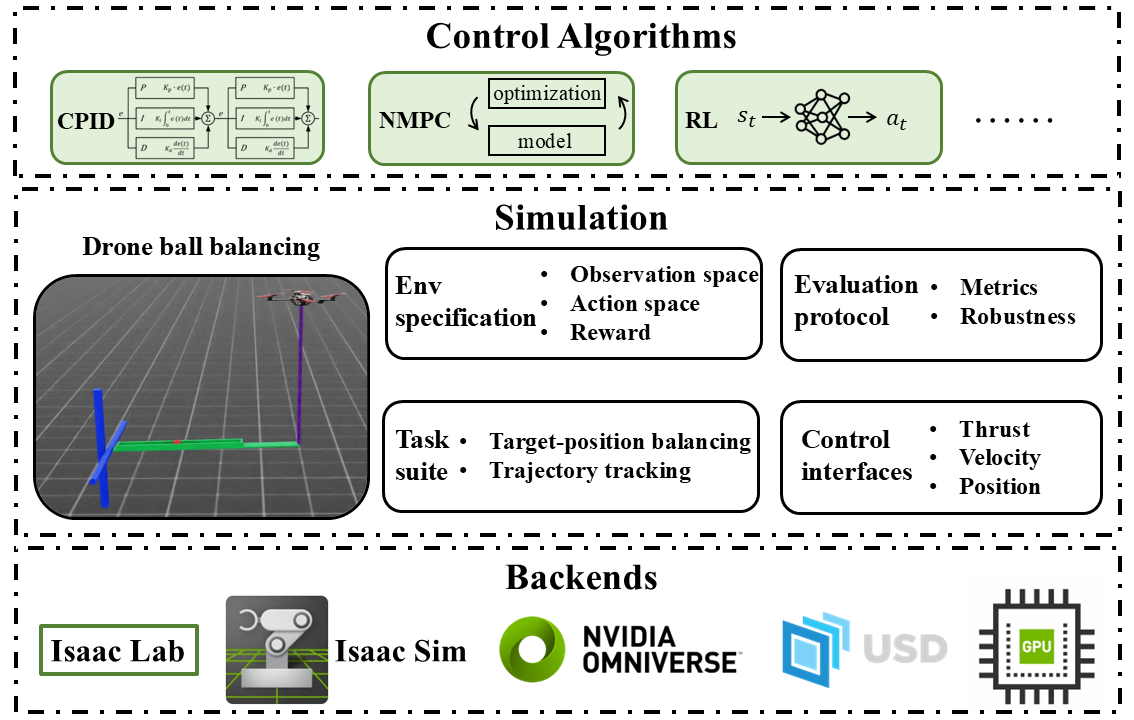
Aerial-Balance-Bench: A Controlled and Reproducible Drone-Ball Balancing Benchmark for Indirect Dynamic Aerial Manipulation
IEEE Robotics and Automation Letters (RA-L). 2026.
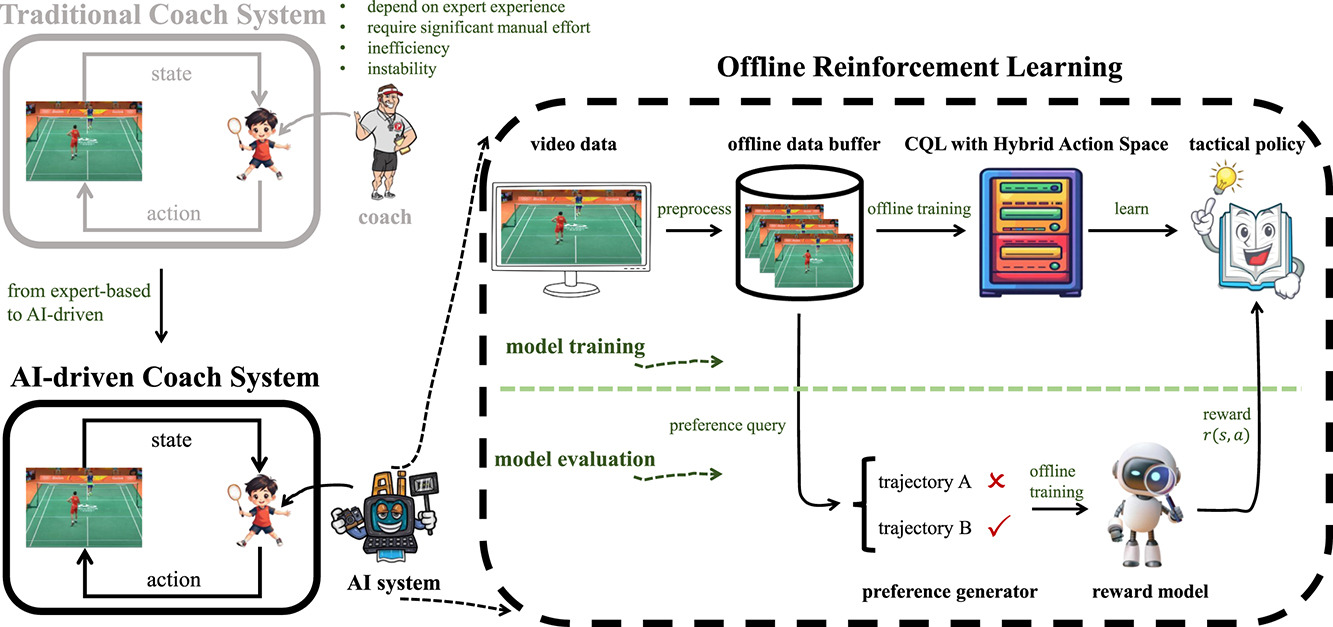
Offline Reinforcement Learning for Badminton Tactical Decision-Making
Engineering Applications of Artificial Intelligence (EAAI). 2026.
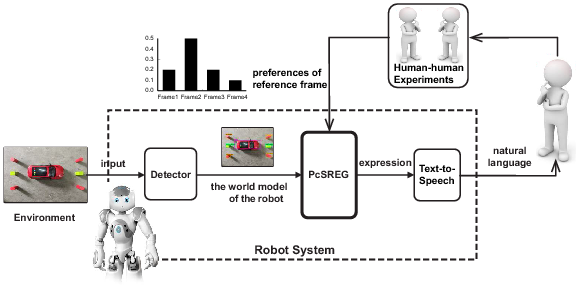
Perspective-corrected Spatial Referring Expression Generation for Human-Robot Interaction
IEEE Transactions on Systems, Man, and Cybernetics: Systems. 2022.
Conference Papers
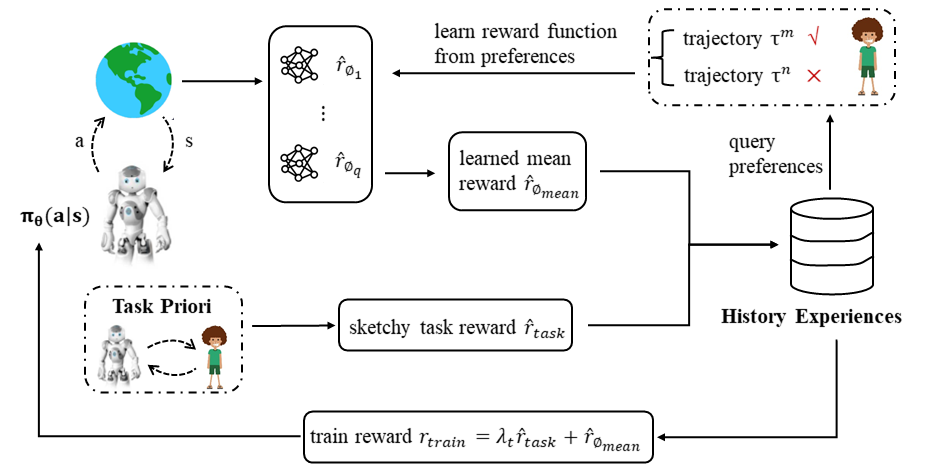
Task Decoupling in Preference-based Reinforcement Learning for Personalized Human-Robot Interaction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022.
Education
- 2024.05 - Present, Ph.D., Department of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University.
- 2019.09 - 2022.07, Master, Department of Control and System Engineering, Nanjing University.
- 2015.09 - 2019.07, Bachelor, Department of Control and System Engineering, Nanjing University.
Experience
- 2024.03 - 2024.05, Research Assistant, The Hong Kong Polytechnic University.
- 2022.07 - 2023.10, Algorithm Engineer, 4paradigm Inc.